Wednesday – traveled to Brussels.
Going through the Vienna train station I noticed there was a wifi network called “refugees”. It’s easy to be cynical about it. But it shows how important access to information is nowadays, for everybody.
At Vienna airport I saw a Boeing 787 Dreamliner from Ethiopian Airlines. It was a nice sight between all the Austrian Airbuses and Fokkers.
This morning, I found my regular hotel’s fitness room completely revamped. Wow!
- The cycling machines were now wall-facing. Apparently pedalists were staring too much at the other users of the fitness room. 🙁
- The water fountain had been moved by 1.5 meters to the left and around the corner.
The LifeFitness equipment still offered the usual menu:
- Hill
- Random
- Heart Rate
- Manual
I usually choose Random but today I felt adventurous, so I did treadmill on Hill, elliptical on Manual / Intervals and the cycling on Manual / Watts. It was a completely new experience! Still the same old track/hill/map/bar chart choice though:

Ergometer Physics
On the train and during the flight, I have been playing a bit with my physics of rowing toybox. I never really looked at the erg model, so when a discussion was stimulated recently on rec.sport.rowing about the part of the power that is not captured by the PM, I started improving my erg model.
As a result, I have two erg models now. Both have their weaknesses, but they seem to agree on the important bit.
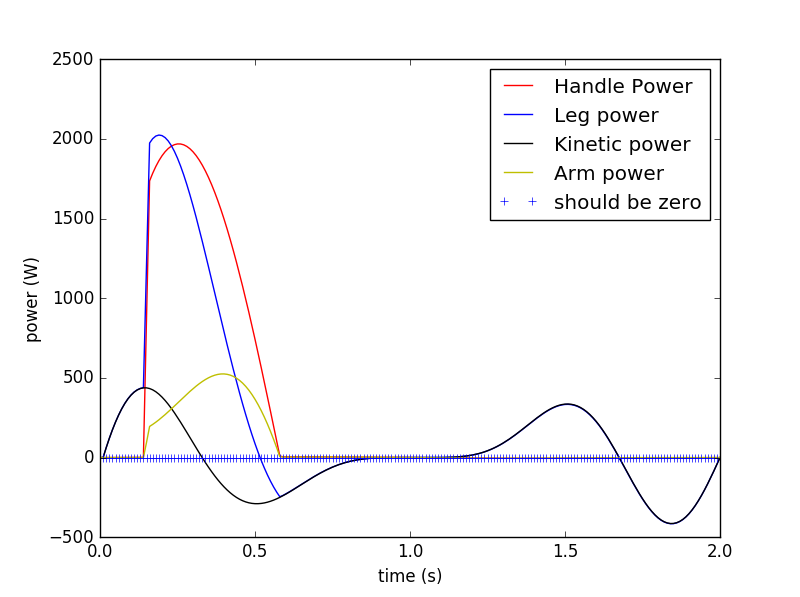
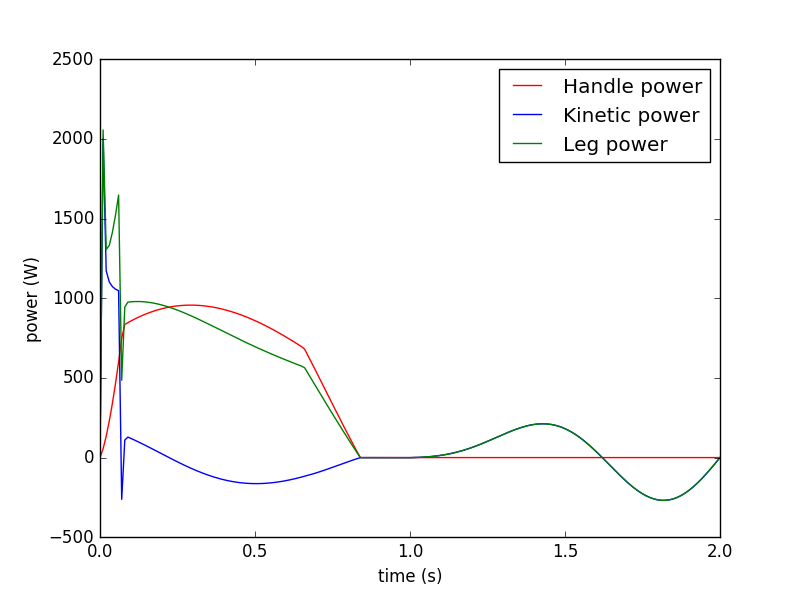
I apologize for the color inconsistency between the two graphs (this was done on an airplane!) and clearly there is a lot to improve, but here are the topics of discussion.
- During the drive (first 0.8 seconds of this graph), leg power is used to accelerate the rower’s body and to accelerate the flywheel. The acceleration of the flywheel is done by the force on the handle. That is the red curve in both graphs.
- Half way during the drive, the rower’s body starts to slow down. There has to be a negative force on the rower’s body. There are two sources of this, one is the handle force and the other is the leg force. By pushing less hard on the legs and starting to swing the back, the rower slows down. In the top graph, you can see “leg power” go negative. This is where the rower is actually hanging/pulling in the footstretcher in order to stop. If he had rown strapless, he would shoot off the slide.
- During the recovery, the rower has to accelerate, then break. One is a positive power (force and velocity have the same direction), the other negative.
The discussion is about how to count these negative lobes. Clearly, they are not measured on the PM. The human leg is not a spring, so you cannot store energy for reuse during the drive, so this negative power has to be accounted somehow. In my model, I just take the absolute value of this power and add it to the total power balance.
It is also clear that the bulk of this extra power is generated during the recovery. During the drive phase, a large part of the kinetic energy in the rower’s body can be transferred to the handle effectively.
Don’t catch me on the numbers and exact shapes of the graphs. It was really toying around trying to explain the principles.
Follow me in social media
Like this:
Like Loading...
{kind=link}
Jun 9 2016
Hill / Random / Heart Rate / Manual
Wednesday – traveled to Brussels.
Going through the Vienna train station I noticed there was a wifi network called “refugees”. It’s easy to be cynical about it. But it shows how important access to information is nowadays, for everybody.
At Vienna airport I saw a Boeing 787 Dreamliner from Ethiopian Airlines. It was a nice sight between all the Austrian Airbuses and Fokkers.
This morning, I found my regular hotel’s fitness room completely revamped. Wow!
The LifeFitness equipment still offered the usual menu:
I usually choose Random but today I felt adventurous, so I did treadmill on Hill, elliptical on Manual / Intervals and the cycling on Manual / Watts. It was a completely new experience! Still the same old track/hill/map/bar chart choice though:
Ergometer Physics
On the train and during the flight, I have been playing a bit with my physics of rowing toybox. I never really looked at the erg model, so when a discussion was stimulated recently on rec.sport.rowing about the part of the power that is not captured by the PM, I started improving my erg model.
As a result, I have two erg models now. Both have their weaknesses, but they seem to agree on the important bit.
I apologize for the color inconsistency between the two graphs (this was done on an airplane!) and clearly there is a lot to improve, but here are the topics of discussion.
The discussion is about how to count these negative lobes. Clearly, they are not measured on the PM. The human leg is not a spring, so you cannot store energy for reuse during the drive, so this negative power has to be accounted somehow. In my model, I just take the absolute value of this power and add it to the total power balance.
It is also clear that the bulk of this extra power is generated during the recovery. During the drive phase, a large part of the kinetic energy in the rower’s body can be transferred to the handle effectively.
Don’t catch me on the numbers and exact shapes of the graphs. It was really toying around trying to explain the principles.
Follow me in social mediaShare this:
Like this:
By sanderroosendaal • Uncategorized • 0 • Tags: concept2, ergometer, hotel fitness, OTE, training